
EN
Xispek
Search

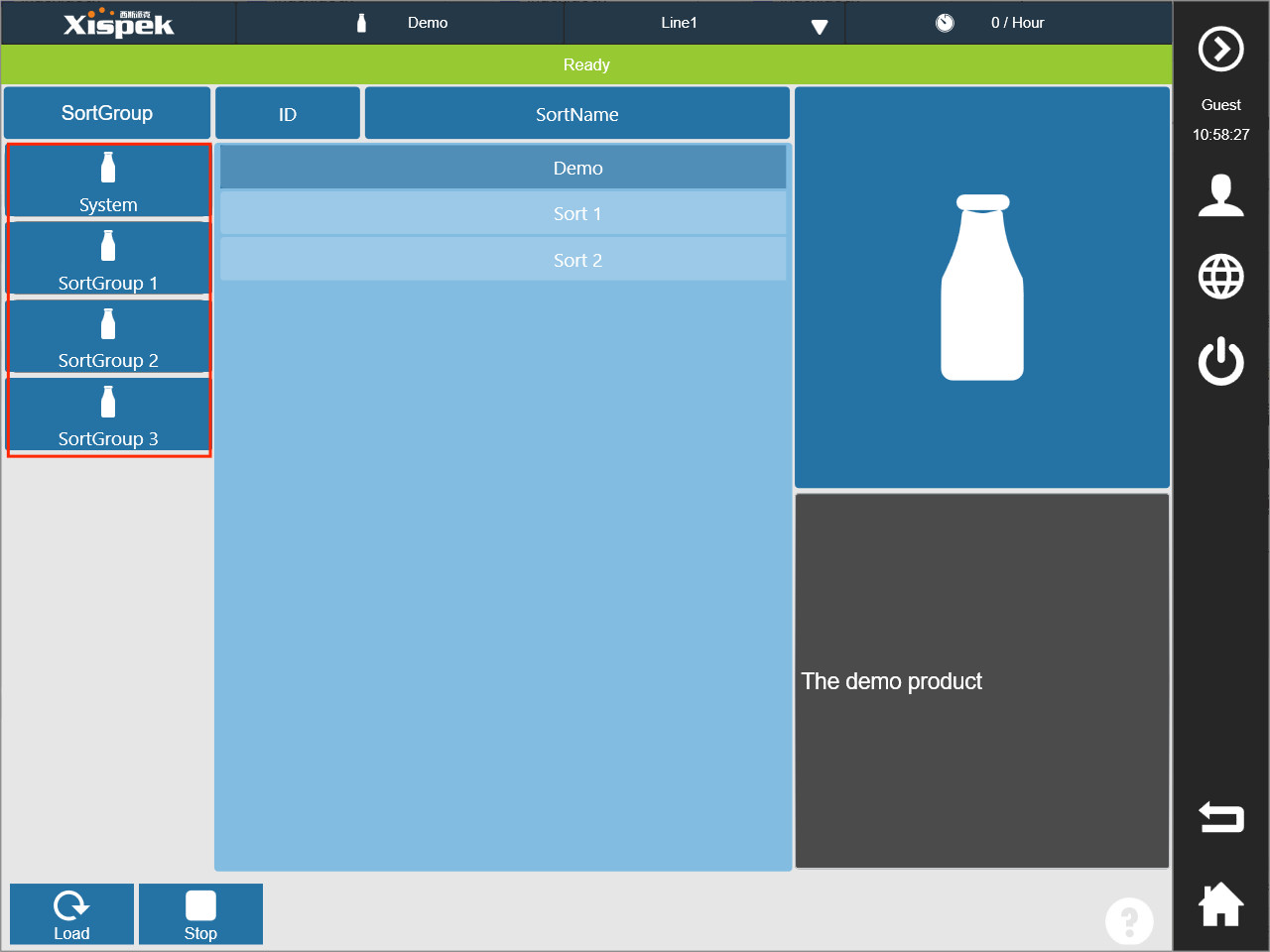
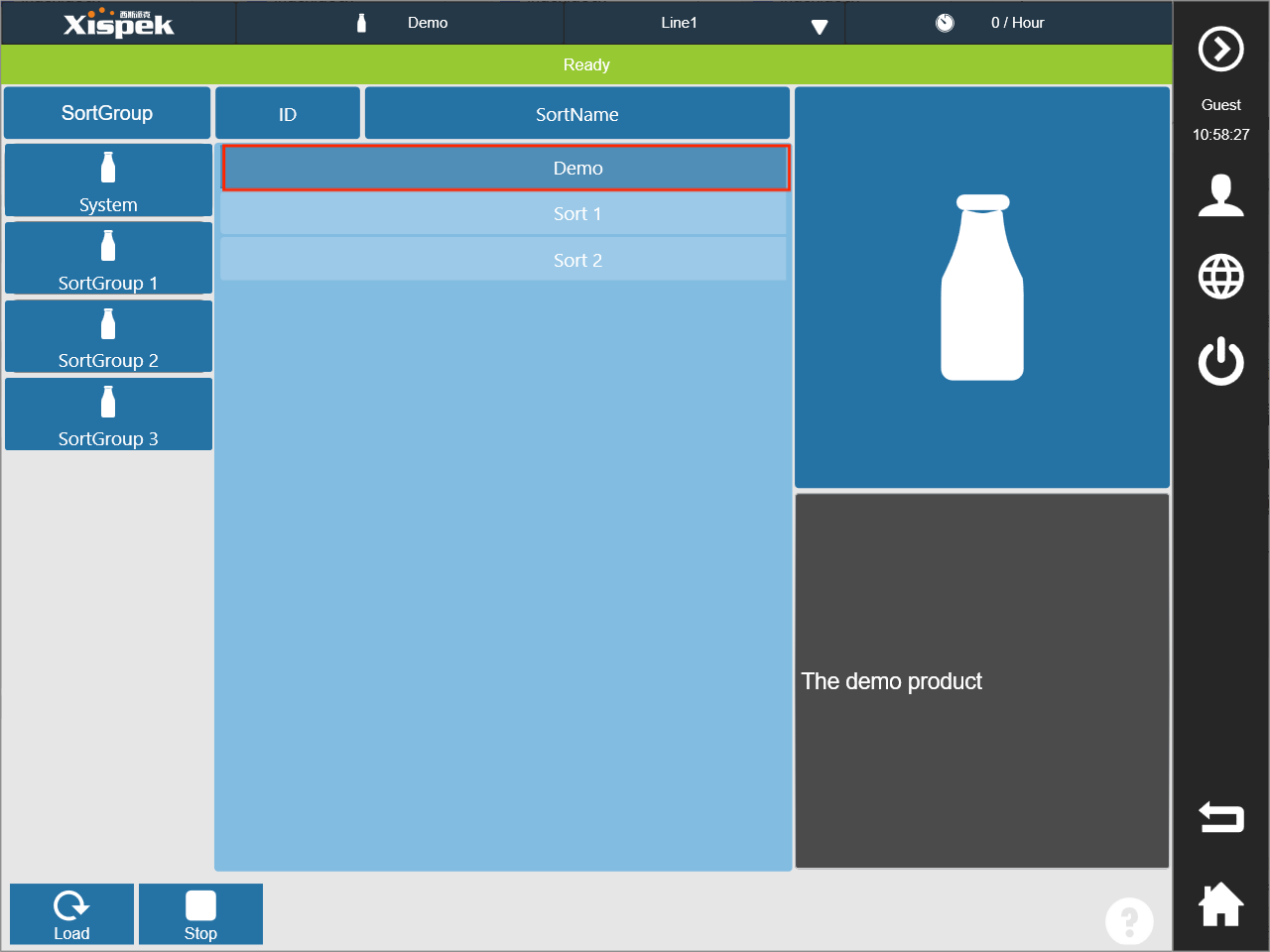
Conversion Products
|
|
|

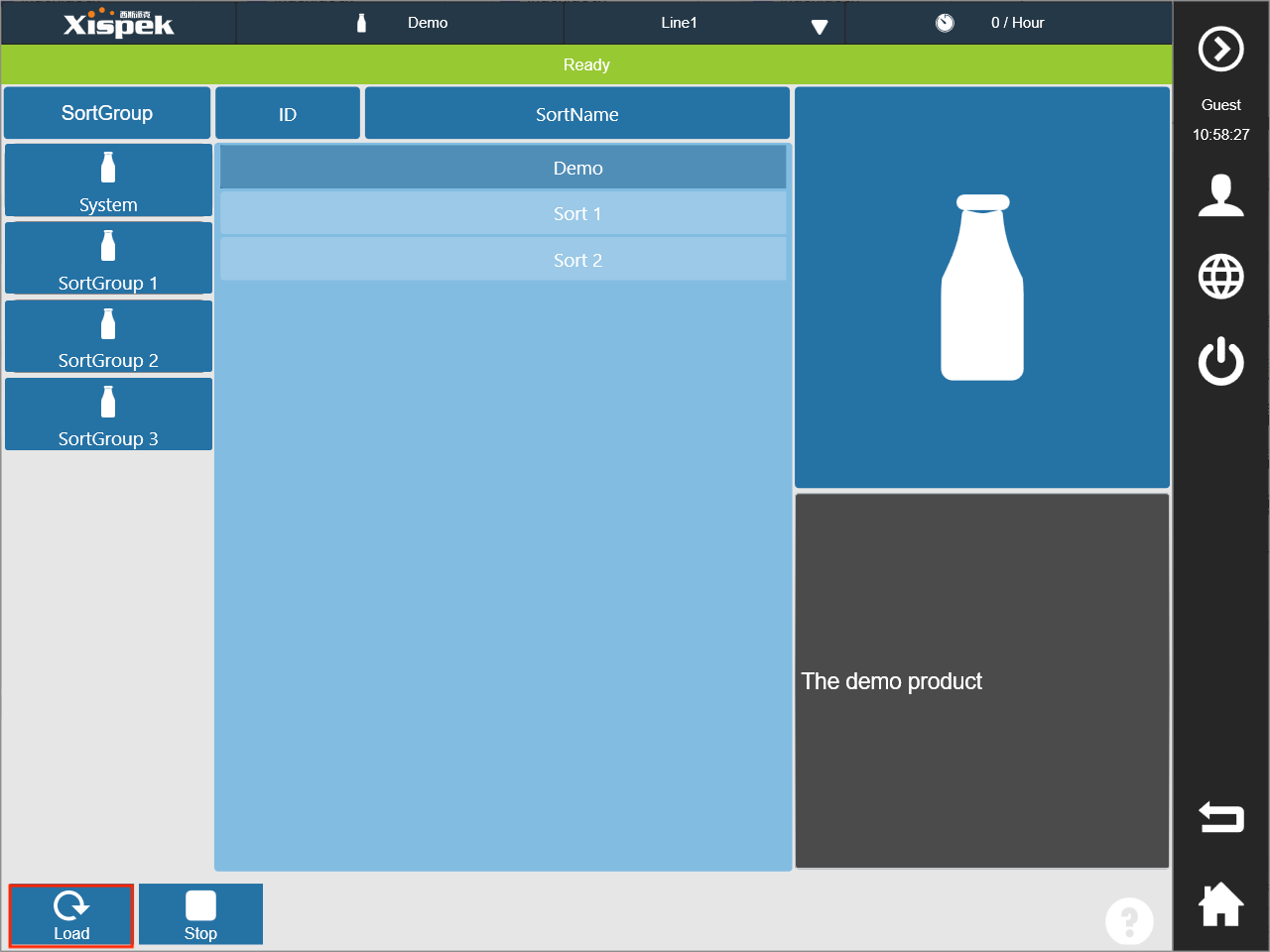
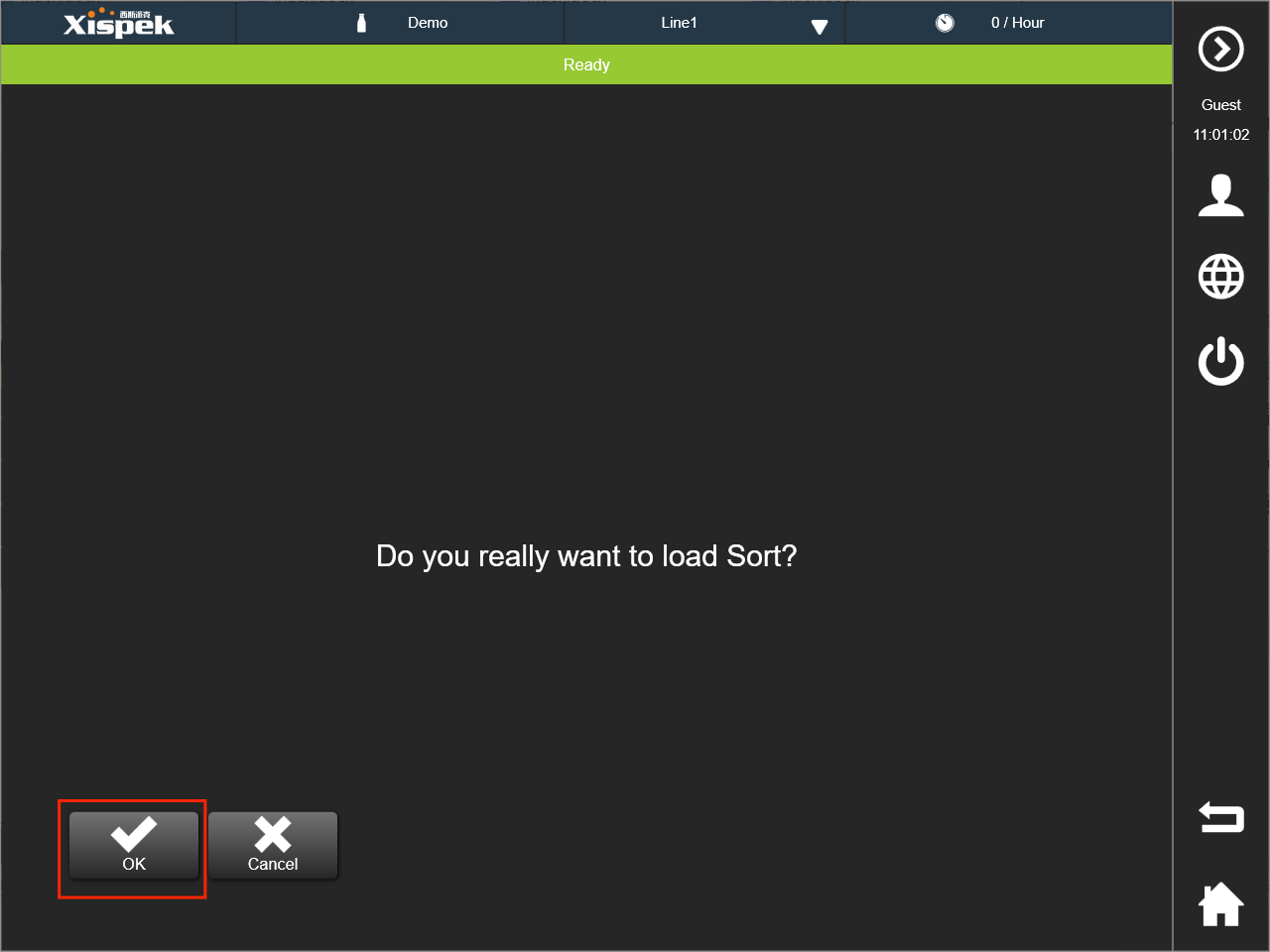
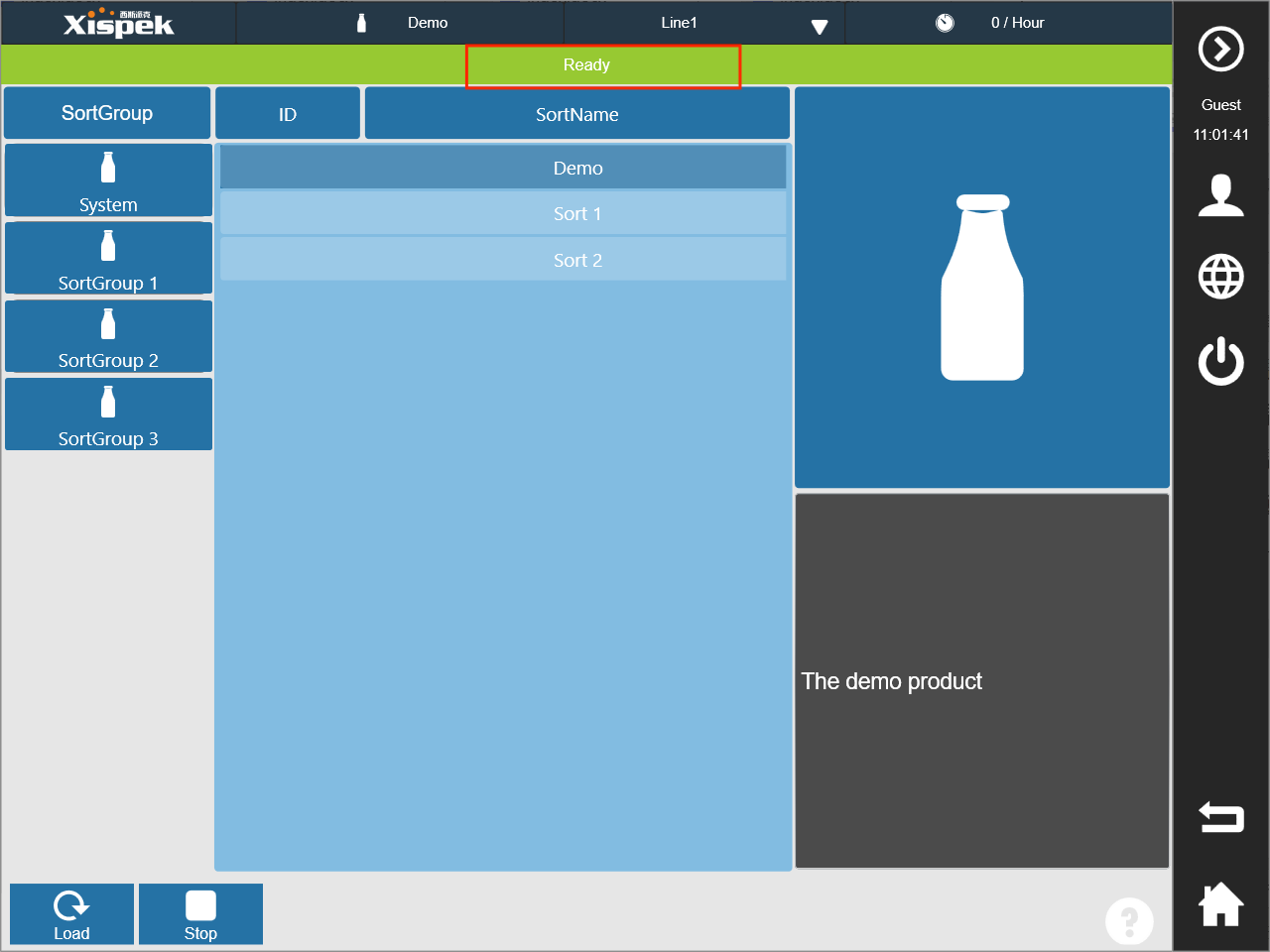
 Click Load Sort button
Click Load Sort button
|
|
|
|
|
|

Scan and follow us
HOTLINE
Sales Hotline
+86-512-52866815
Ms. Teng:13912634335
Mr. Su:13912634161
Mr. Su:13912634161
Xispek Inspection Technology Co., Ltd.
+86-512-52866815
Building 6-1, AutoSpace, Yangguang Avenue 58, Changshu, Suzhou China
Xispek Germany
Xispek technische Beratung Dr. Zhang e.K.
+49 (2335) 9711-492
Am Kohlenbrink 4, 58300 Wetter(Ruhr), Germany
Xispek Shenzhen Office
+86 (186) 6431-8649
5th Floor, Ziguang Information Port, Science and Technology Park, Nanshan District, Shenzhen China
Xispek Russia AFR LLC
+ 7 (812) 331-20-27
270 Ligovsky Ave, 196006 St. Petersburg, Russia
Copyright Suzhou Xispek Inspection Technology Co.,Ltd
Filing number:
Technical support: SunCloud Network
✕